# required packages
# ! pip install torch torchvision numpy
Convolutional Neural Networks¶
Convolution¶
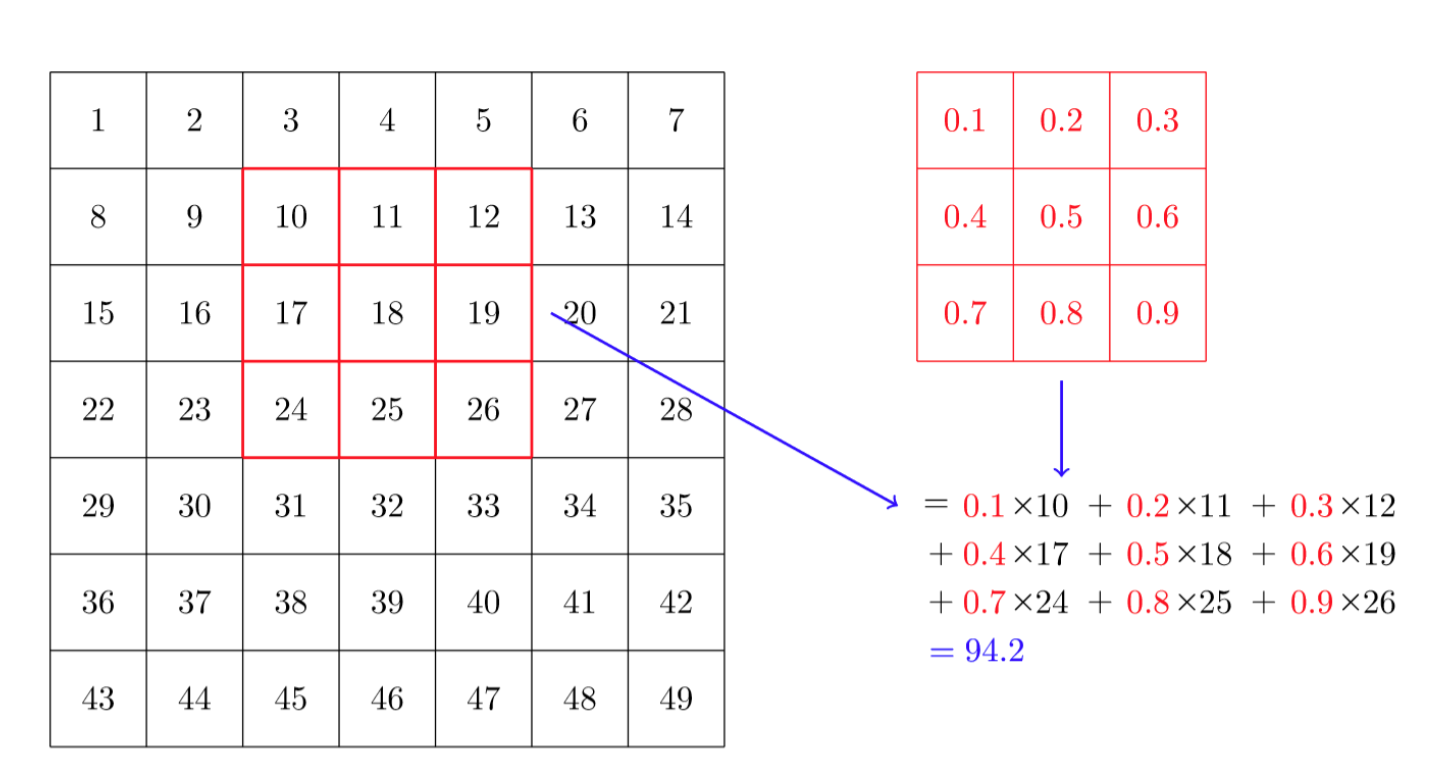
Convolutions allow us to distinguish important features in our images more readily. The way that they operate is by applying a filter kernel across our image.
This following image provides another view of what is happening in our convolutional neural network:
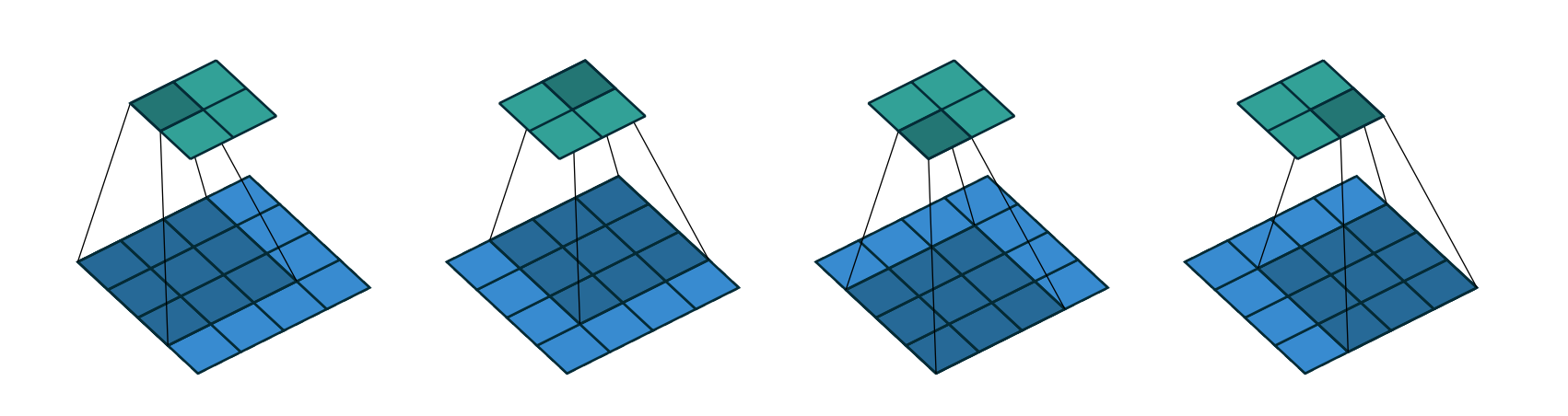
As we can see, each convolution allows us to hone in on more specific features of our image. For example, some of our kernels will detect horizontal edges, vertical edges, or diagonal edges. These help classify objects like digits more precisely.
In Pytorch, these convolutions can be easily implemented using the following functional F.conv2d or using the class nn.Conv2d. These take in rank 4 tensors of the form [batch_size, channels, width, height].
Quick Note: In numerical image procesing, a channel refers to the color scale of our image. Hence, for a grayscale image, we have 1 channel. For a RGB image, we have 3 channels. Convolutions can deal with any number of channels.
Our weights are kernels of shape (out_cannels, in_channels, kH, kW).
There is a formula that is useful for this type of operations. Given a $n \times n$ image and a filter, kernel of shape $f \times f$ we get the following equation for the shape of our activaton feature map $(n-f+1) \times (n-f+1)$.
Paddings and Strides¶
As we see from the previous section, our feature map will be reduced. With multiple layers of convolutions, we get smaller and smaller feature maps. In order to maintain the same size as our input, we need to satisfy the following equation $n-f+1 = n$.
Padding helps us make our input bigger by adding extra space around our input (usually with value 0). This allows us to keep a bigger feature map.
For an odd shaped kernel, the equation for maintaining feature map shape is $\text{kernel size} // 2$.
Strides tell us how many pixels to jump over when applying the filter kernel over our input image. Striding tells us how many low-level features are ignored. With a stride-2 convolution, we decrease the activation map by a factor of 4. We thus want to increase the number of ouput activations to make sure that we don't decrease the capacity of a layer by too much. It halves the width and height of each input. Doubling the number of filters does not change the overall amount of computation. It allows us to extract richer features with each successive layer.
Batch Normalization¶
This is a technique by converting the activations of a layer into standard units. It also adds two learnable parameters (usually called gamma [$\gamma$] and beta[$\beta$]) that help account for activation differentiation (ie when you want some activations to be really high in order to make accurate predictions). The normalizing process yields an activation vector $\vec{y}$ and return $\gamma\vec{y} + \beta$.
This helps improve the accuracy of our models.
MNIST Digit Classifier¶
Exploration¶
This is the same dataset that we used for our old MNIST digit classifier dataset. We are applying the same image transformations to normalize them.
import torch
import torch.nn as nn
import torch.nn.functional as F
from torch.utils.data import DataLoader, random_split, Dataset
import torchvision
from torchvision.transforms import v2
import torchvision.models as models
import numpy as np
#noramlization functions for our dataset
transformations = v2.Compose([v2.ToImage(), v2.ToDtype(torch.float32, scale = True), v2.Normalize((0.1307,), (0.3081,))])
train_ds = torchvision.datasets.MNIST(
root = ".", train = True, download = True, transform = transformations
)
test_ds = torchvision.datasets.MNIST(
root = ".", train = False, download = True, transform = transformations
)
print(f"The length of our training dataset: {len(train_ds)}")
v2.ToPILImage()(train_ds[0][0]).resize((100,100))
The length of our training dataset: 60000

A great way to improve the accuracy of our model is by increasing our batch size. It's important to be careful when choosing our batch size as the bigger the batch size, the more memory it takes.
It is also important to make sure that our batch size is reasonable with respect to the size of the full dataset. Here, since we have 60,000 images in our dataset, we can work with a batchsize of 512.
valid_size = int(0.1 * len(train_ds))
train_size = len(train_ds) - valid_size
train_ds, valid_ds = random_split(train_ds, [train_size, valid_size])
train_dl = DataLoader(train_ds, batch_size = 512, shuffle = True)
valid_dl = DataLoader(train_ds, batch_size = 512, shuffle = True)
xb, yb = next(iter(train_dl))
xb.shape, yb.shape
(torch.Size([512, 1, 28, 28]), torch.Size([512]))
Building our Model¶
#Choosing our device for acceleration
if torch.cuda.is_available(): #For NVIDIA GPU
device = torch.device("cuda")
elif torch.backends.mps.is_available(): #For MAC OS
device = torch.device("mps")
else:
device = torch.device("cpu")
print(device)
mps
In code¶
def conv(ni, nf, ks = 3, act = True):
layers = [nn.Conv2d(ni, nf, kernel_size = ks, padding = ks//2, stride = 2)]
if act:
layers.append(nn.ReLU())
layers.append(nn.BatchNorm2d(nf))
return nn.Sequential(*layers)
simple_cnn = nn.Sequential(
conv(1, 4),
conv(4, 8),
conv(8,16),
conv(16,32),
conv(32, 64),
conv(64, 10, act = False),
nn.Flatten()
)
simple_nn = nn.Sequential(
nn.Flatten(),
nn.Linear(28*28, 128),
nn.ReLU(),
nn.Linear(128, 10)
)
loss_f = F.cross_entropy
print(simple_cnn(xb).shape)
simple_cnn.to(device), simple_nn.to(device)
torch.Size([512, 10])
(Sequential(
(0): Sequential(
(0): Conv2d(1, 4, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1))
(1): ReLU()
(2): BatchNorm2d(4, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
(1): Sequential(
(0): Conv2d(4, 8, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1))
(1): ReLU()
(2): BatchNorm2d(8, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
(2): Sequential(
(0): Conv2d(8, 16, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1))
(1): ReLU()
(2): BatchNorm2d(16, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
(3): Sequential(
(0): Conv2d(16, 32, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1))
(1): ReLU()
(2): BatchNorm2d(32, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
(4): Sequential(
(0): Conv2d(32, 64, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1))
(1): ReLU()
(2): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
(5): Sequential(
(0): Conv2d(64, 10, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1))
(1): BatchNorm2d(10, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
(6): Flatten(start_dim=1, end_dim=-1)
),
Sequential(
(0): Flatten(start_dim=1, end_dim=-1)
(1): Linear(in_features=784, out_features=128, bias=True)
(2): ReLU()
(3): Linear(in_features=128, out_features=10, bias=True)
))
Notes on the code
Training¶
Very simple training loop using a Stochastic Gradient Descent (SGD) algorithm.
def train(model, model_name, train_dl, valid_dl, epochs = 10, lr = 0.06, loss_f = loss_f, params = None, scheduler = None, momentum = 0):
if not params:
params = model.parameters()
sgd = torch.optim.SGD(params, lr = lr, momentum = momentum)
if scheduler:
scheduler = scheduler(sgd)
def train_epoch():
epoch_loss = np.array([])
for xb, yb in train_dl:
xb, yb = xb.to(device), yb.to(device)
loss = loss_f(model(xb), yb)
epoch_loss = np.append(epoch_loss, loss.item())
loss.backward()
sgd.step()
sgd.zero_grad()
return epoch_loss.mean()
def validate_epoch():
valid_loss = np.array([])
accuracy = np.array([])
for xb, yb in valid_dl:
xb, yb = xb.to(device), yb.to(device)
with torch.no_grad():
pred = model(xb)
loss = loss_f(pred, yb)
valid_loss = np.append(valid_loss, loss.item())
pred = torch.softmax(pred, dim = 1)
infered_prediction = torch.argmax(pred, dim = 1)
accuracy = np.append(accuracy, torch.Tensor.cpu((infered_prediction == yb).float()).mean())
return valid_loss.mean(), accuracy.mean()
print(f"Model: {model_name}")
for ep in range(epochs):
epoch_loss = train_epoch()
valid_loss, accuracy = validate_epoch()
if scheduler:
scheduler.step()
print(f"Ep #{ep+1} | Train Mean Loss: {round(epoch_loss, 3)} | Valid Mean Loss: {round(valid_loss,3)} | Accuracy: {round(accuracy,3)}")
print("\n") # for clean separation of logging data
train(simple_cnn, "CNN", train_dl, valid_dl)
train(simple_nn, 'NN', train_dl, valid_dl)
Model: CNN Ep #1 | Train Mean Loss: 0.61 | Valid Mean Loss: 0.345 | Accuracy: 0.939 Ep #2 | Train Mean Loss: 0.269 | Valid Mean Loss: 0.216 | Accuracy: 0.962 Ep #3 | Train Mean Loss: 0.189 | Valid Mean Loss: 0.162 | Accuracy: 0.97 Ep #4 | Train Mean Loss: 0.147 | Valid Mean Loss: 0.128 | Accuracy: 0.976 Ep #5 | Train Mean Loss: 0.121 | Valid Mean Loss: 0.108 | Accuracy: 0.979 Ep #6 | Train Mean Loss: 0.105 | Valid Mean Loss: 0.095 | Accuracy: 0.981 Ep #7 | Train Mean Loss: 0.092 | Valid Mean Loss: 0.084 | Accuracy: 0.983 Ep #8 | Train Mean Loss: 0.082 | Valid Mean Loss: 0.076 | Accuracy: 0.985 Ep #9 | Train Mean Loss: 0.076 | Valid Mean Loss: 0.071 | Accuracy: 0.986 Ep #10 | Train Mean Loss: 0.069 | Valid Mean Loss: 0.07 | Accuracy: 0.984 Model: NN Ep #1 | Train Mean Loss: 0.711 | Valid Mean Loss: 0.379 | Accuracy: 0.895 Ep #2 | Train Mean Loss: 0.338 | Valid Mean Loss: 0.304 | Accuracy: 0.913 Ep #3 | Train Mean Loss: 0.288 | Valid Mean Loss: 0.268 | Accuracy: 0.923 Ep #4 | Train Mean Loss: 0.257 | Valid Mean Loss: 0.241 | Accuracy: 0.931 Ep #5 | Train Mean Loss: 0.233 | Valid Mean Loss: 0.221 | Accuracy: 0.937 Ep #6 | Train Mean Loss: 0.214 | Valid Mean Loss: 0.204 | Accuracy: 0.943 Ep #7 | Train Mean Loss: 0.198 | Valid Mean Loss: 0.187 | Accuracy: 0.947 Ep #8 | Train Mean Loss: 0.183 | Valid Mean Loss: 0.174 | Accuracy: 0.951 Ep #9 | Train Mean Loss: 0.172 | Valid Mean Loss: 0.163 | Accuracy: 0.955 Ep #10 | Train Mean Loss: 0.161 | Valid Mean Loss: 0.156 | Accuracy: 0.956
Testing¶
test_dl = DataLoader(test_ds, batch_size = 256, shuffle = True)
def test(model, test_dl):
test_loss = np.array([])
accuracy = np.array([])
for xb, yb in test_dl:
xb, yb = xb.to(device), yb.to(device)
with torch.no_grad():
pred = model(xb)
loss = loss_f(pred, yb)
test_loss = np.append(test_loss, loss.item())
pred = torch.softmax(pred, dim = 1)
infered_prediction = torch.argmax(pred, dim = 1)
accuracy = np.append(accuracy, torch.Tensor.cpu((infered_prediction == yb).float()).mean())
mean_accuracy = np.mean(accuracy)
mean_loss = np.mean(test_loss)
return mean_accuracy, mean_loss
cnn_test = test(simple_cnn, test_dl)
nn_test = test(simple_nn, test_dl)
print(f"We observe the following stats for our CNN: \nAccuracy: {cnn_test[0]} || Loss: {cnn_test[1]}")
print("\n")
print(f"We observe the following stats for our NN: \nAccuracy: {nn_test[0]} || Loss: {nn_test[1]}")
We observe the following stats for our CNN: Accuracy: 0.9720703125 || Loss: 0.111271489597857 We observe the following stats for our NN: Accuracy: 0.95166015625 || Loss: 0.16452500447630883
As we observe, our CNN is much more effective at recognizing our digits than the simple neural network.
Dog vs Cat Classifier¶
Exploration¶
from datasets import load_dataset
cats_dogs = load_dataset("microsoft/cats_vs_dogs")['train']
display(cats_dogs['image'][0])
display(cats_dogs['image'][1])


transformation = v2.Compose([v2.Resize((128,128)),
v2.RandomHorizontalFlip(),
v2.RandomRotation(10),
v2.ColorJitter(brightness=0.1, contrast=0.1),
v2.Grayscale(num_output_channels = 3),
v2.ToImage(),
v2.ToDtype(torch.float32, scale = True),
])
class CatsDogsDataset(Dataset):
def __init__(self, images, labels, transform):
super().__init__()
self.data = images
self.labels = labels
self.transform = transform
def __len__(self):
return len(self.data)
def __getitem__(self, idx):
sample = self.data[idx]
label = self.labels[idx]
if self.transform:
sample = self.transform(sample)
return sample, label
cats_dogs_ds = CatsDogsDataset(cats_dogs['image'], cats_dogs['labels'], transformation)
cats_dogs_ds[0]
(Image([[[0.0431, 0.0431, 0.0431, ..., 0.0431, 0.0431, 0.0431],
[0.0431, 0.0431, 0.0431, ..., 0.0431, 0.0431, 0.0431],
[0.0431, 0.0431, 0.0431, ..., 0.0431, 0.0431, 0.0431],
...,
[0.0431, 0.0431, 0.0431, ..., 0.0431, 0.0431, 0.0431],
[0.0431, 0.0431, 0.0431, ..., 0.0431, 0.0431, 0.0431],
[0.0431, 0.0431, 0.0431, ..., 0.0431, 0.0431, 0.0431]],
[[0.0431, 0.0431, 0.0431, ..., 0.0431, 0.0431, 0.0431],
[0.0431, 0.0431, 0.0431, ..., 0.0431, 0.0431, 0.0431],
[0.0431, 0.0431, 0.0431, ..., 0.0431, 0.0431, 0.0431],
...,
[0.0431, 0.0431, 0.0431, ..., 0.0431, 0.0431, 0.0431],
[0.0431, 0.0431, 0.0431, ..., 0.0431, 0.0431, 0.0431],
[0.0431, 0.0431, 0.0431, ..., 0.0431, 0.0431, 0.0431]],
[[0.0431, 0.0431, 0.0431, ..., 0.0431, 0.0431, 0.0431],
[0.0431, 0.0431, 0.0431, ..., 0.0431, 0.0431, 0.0431],
[0.0431, 0.0431, 0.0431, ..., 0.0431, 0.0431, 0.0431],
...,
[0.0431, 0.0431, 0.0431, ..., 0.0431, 0.0431, 0.0431],
[0.0431, 0.0431, 0.0431, ..., 0.0431, 0.0431, 0.0431],
[0.0431, 0.0431, 0.0431, ..., 0.0431, 0.0431, 0.0431]]], ),
0)
len(cats_dogs_ds)
23410
test_split = int(len(cats_dogs_ds) * 0.2)
train_split = len(cats_dogs_ds) - test_split
train_valid_ds, test_ds = random_split(cats_dogs_ds, [test_split, train_split])
valid_split = int(len(train_valid_ds)*0.1)
train_split = len(train_valid_ds) - valid_split
train_ds, valid_ds = random_split(train_valid_ds, [valid_split, train_split])
train_dl = DataLoader(train_ds, batch_size = 512, shuffle = True)
valid_dl = DataLoader(valid_ds, batch_size = 512, shuffle = True )
test_dl = DataLoader(test_ds, batch_size = 512, shuffle = True)
xb, yb = next(iter(train_dl))
xb.shape, yb.shape
(torch.Size([468, 3, 128, 128]), torch.Size([468]))
Our own model¶
cats_dogs_cnn = nn.Sequential(
conv(3,6),
conv(6, 12),
conv(12, 24),
conv(24, 48),
nn.Dropout(p=0.5),
conv(48, 96),
conv(96, 192),
conv(192, 384),
conv(384, 2, act = False),
nn.Flatten()
)
cats_dogs_cnn.to(device)
xb = xb.to(device)
cats_dogs_cnn(xb).shape
torch.Size([468, 2])
train(cats_dogs_cnn, "Cats Dogs CNN", train_dl, valid_dl, epochs = 20)
Model: Cats Dogs CNN Ep #1 | Train Mean Loss: 0.873 | Valid Mean Loss: 0.876 | Accuracy: 0.515 Ep #2 | Train Mean Loss: 0.908 | Valid Mean Loss: 0.745 | Accuracy: 0.52 Ep #3 | Train Mean Loss: 0.698 | Valid Mean Loss: 0.705 | Accuracy: 0.545 Ep #4 | Train Mean Loss: 0.69 | Valid Mean Loss: 0.706 | Accuracy: 0.538 Ep #5 | Train Mean Loss: 0.691 | Valid Mean Loss: 0.705 | Accuracy: 0.536 Ep #6 | Train Mean Loss: 0.669 | Valid Mean Loss: 0.694 | Accuracy: 0.551 Ep #7 | Train Mean Loss: 0.674 | Valid Mean Loss: 0.706 | Accuracy: 0.531 Ep #8 | Train Mean Loss: 0.649 | Valid Mean Loss: 0.7 | Accuracy: 0.546 Ep #9 | Train Mean Loss: 0.664 | Valid Mean Loss: 0.705 | Accuracy: 0.536 Ep #10 | Train Mean Loss: 0.65 | Valid Mean Loss: 0.697 | Accuracy: 0.562 Ep #11 | Train Mean Loss: 0.668 | Valid Mean Loss: 0.699 | Accuracy: 0.546 Ep #12 | Train Mean Loss: 0.645 | Valid Mean Loss: 0.703 | Accuracy: 0.553 Ep #13 | Train Mean Loss: 0.632 | Valid Mean Loss: 0.698 | Accuracy: 0.559 Ep #14 | Train Mean Loss: 0.636 | Valid Mean Loss: 0.696 | Accuracy: 0.568 Ep #15 | Train Mean Loss: 0.648 | Valid Mean Loss: 0.694 | Accuracy: 0.573 Ep #16 | Train Mean Loss: 0.626 | Valid Mean Loss: 0.701 | Accuracy: 0.561 Ep #17 | Train Mean Loss: 0.633 | Valid Mean Loss: 0.71 | Accuracy: 0.562 Ep #18 | Train Mean Loss: 0.634 | Valid Mean Loss: 0.702 | Accuracy: 0.562 Ep #19 | Train Mean Loss: 0.619 | Valid Mean Loss: 0.705 | Accuracy: 0.562 Ep #20 | Train Mean Loss: 0.63 | Valid Mean Loss: 0.699 | Accuracy: 0.566
accuracy, loss = test(cats_dogs_cnn, test_dl)
print(f"We find the following mean accuracy {accuracy} and loss {loss} for our model. ")
We find the following mean accuracy 0.5662279145137684 and loss 0.6992067324148642 for our model.
As we notice, this is not great accuracy. It seems that our model goes a little shy of guessing. Usually, it is rare to train a full CNN from scratch. We will now try a different approach: transfer learning!
Transfer Learning¶
For this task, we will use a Resnet 18!
It's important to disable the gradient calculations for the parameters before the final layer so that we are not unnecessarily computing extra gradients. For this reason too, we will be only optimizing the parameters of our final layers.
Another important feature is that we are adding a learning rate scheduler.
resnet18 = models.resnet18(weights = "DEFAULT")
for param in resnet18.parameters():
param.requires_grad = False
num_ftrs = resnet18.fc.in_features
resnet18.fc = nn.Sequential(
nn.Linear(num_ftrs, 2),
)
resnet18.to(device)
steplr = lambda optim : torch.optim.lr_scheduler.StepLR(optim, step_size = 5, gamma = 0.1)
train(resnet18, "Resnet 18", train_dl, valid_dl, epochs = 25, params = resnet18.fc.parameters(), scheduler = steplr, lr = 0.06)
Model: Resnet 18 Ep #1 | Train Mean Loss: 0.865 | Valid Mean Loss: 4.776 | Accuracy: 0.493 Ep #2 | Train Mean Loss: 4.528 | Valid Mean Loss: 6.444 | Accuracy: 0.501 Ep #3 | Train Mean Loss: 6.573 | Valid Mean Loss: 4.22 | Accuracy: 0.493 Ep #4 | Train Mean Loss: 3.93 | Valid Mean Loss: 5.882 | Accuracy: 0.499 Ep #5 | Train Mean Loss: 5.991 | Valid Mean Loss: 3.533 | Accuracy: 0.5 Ep #6 | Train Mean Loss: 3.267 | Valid Mean Loss: 2.379 | Accuracy: 0.528 Ep #7 | Train Mean Loss: 2.124 | Valid Mean Loss: 1.462 | Accuracy: 0.596 Ep #8 | Train Mean Loss: 1.318 | Valid Mean Loss: 0.916 | Accuracy: 0.671 Ep #9 | Train Mean Loss: 0.832 | Valid Mean Loss: 0.579 | Accuracy: 0.752 Ep #10 | Train Mean Loss: 0.518 | Valid Mean Loss: 0.464 | Accuracy: 0.789 Ep #11 | Train Mean Loss: 0.381 | Valid Mean Loss: 0.458 | Accuracy: 0.791 Ep #12 | Train Mean Loss: 0.417 | Valid Mean Loss: 0.443 | Accuracy: 0.811 Ep #13 | Train Mean Loss: 0.387 | Valid Mean Loss: 0.437 | Accuracy: 0.804 Ep #14 | Train Mean Loss: 0.361 | Valid Mean Loss: 0.435 | Accuracy: 0.805 Ep #15 | Train Mean Loss: 0.389 | Valid Mean Loss: 0.431 | Accuracy: 0.801 Ep #16 | Train Mean Loss: 0.386 | Valid Mean Loss: 0.44 | Accuracy: 0.804 Ep #17 | Train Mean Loss: 0.352 | Valid Mean Loss: 0.426 | Accuracy: 0.811 Ep #18 | Train Mean Loss: 0.398 | Valid Mean Loss: 0.428 | Accuracy: 0.806 Ep #19 | Train Mean Loss: 0.394 | Valid Mean Loss: 0.434 | Accuracy: 0.806 Ep #20 | Train Mean Loss: 0.36 | Valid Mean Loss: 0.437 | Accuracy: 0.808 Ep #21 | Train Mean Loss: 0.359 | Valid Mean Loss: 0.435 | Accuracy: 0.812 Ep #22 | Train Mean Loss: 0.401 | Valid Mean Loss: 0.434 | Accuracy: 0.808 Ep #23 | Train Mean Loss: 0.357 | Valid Mean Loss: 0.406 | Accuracy: 0.812 Ep #24 | Train Mean Loss: 0.398 | Valid Mean Loss: 0.43 | Accuracy: 0.812 Ep #25 | Train Mean Loss: 0.342 | Valid Mean Loss: 0.407 | Accuracy: 0.811
test(resnet18, test_dl)
(np.float64(0.8096466402749758), np.float64(0.42531078087316976))
We got much better accuracy by transfer learning a pretrained resnet18 model. 0.81 is pretty good but could be improved. We need to proabably adjust some hyperparameters.